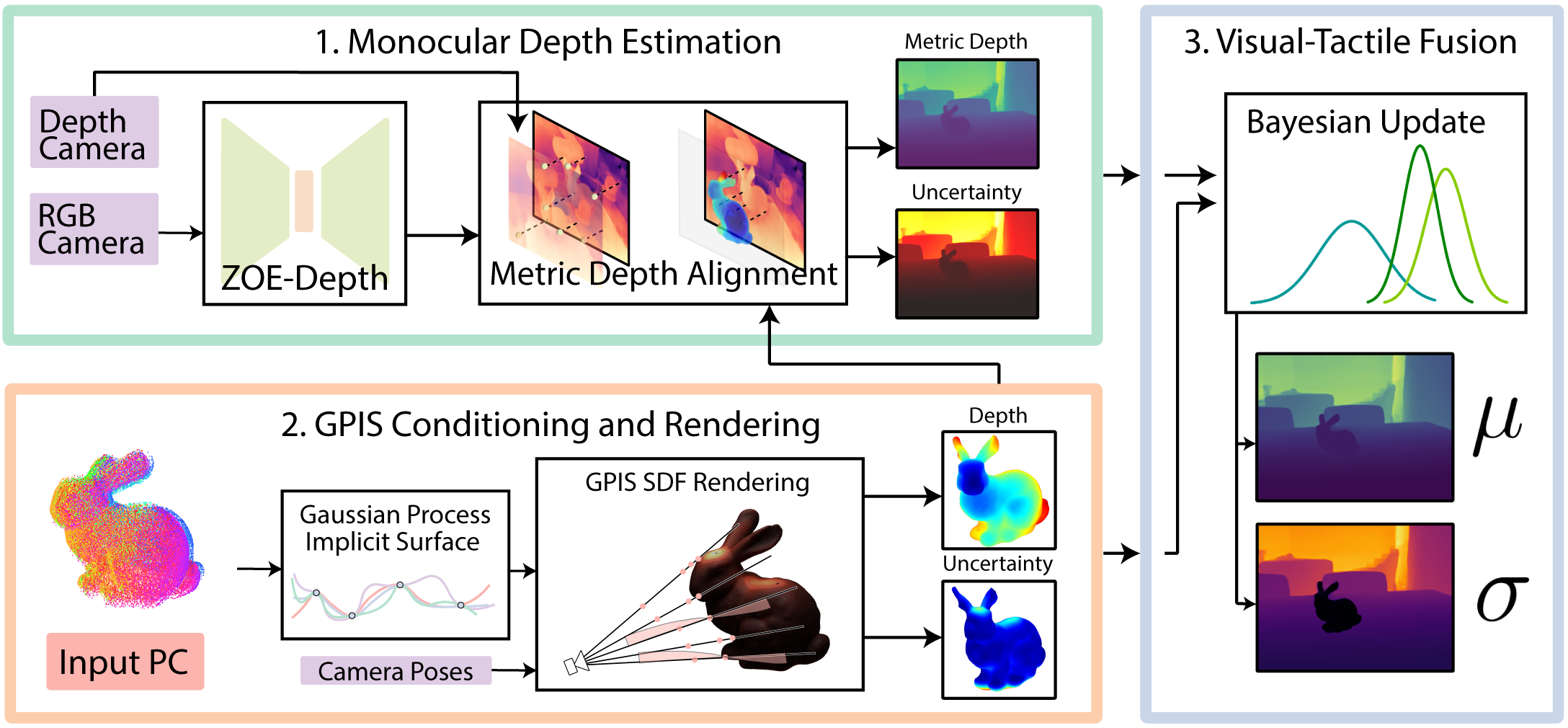
Our method leverages state-of-the-art monocular depth
estimation and Gaussian Process Implicit Surfaces from
touches along an object and optimally fuses them to train a
Gaussian
Splatting model, or any other traditional NeRF. The
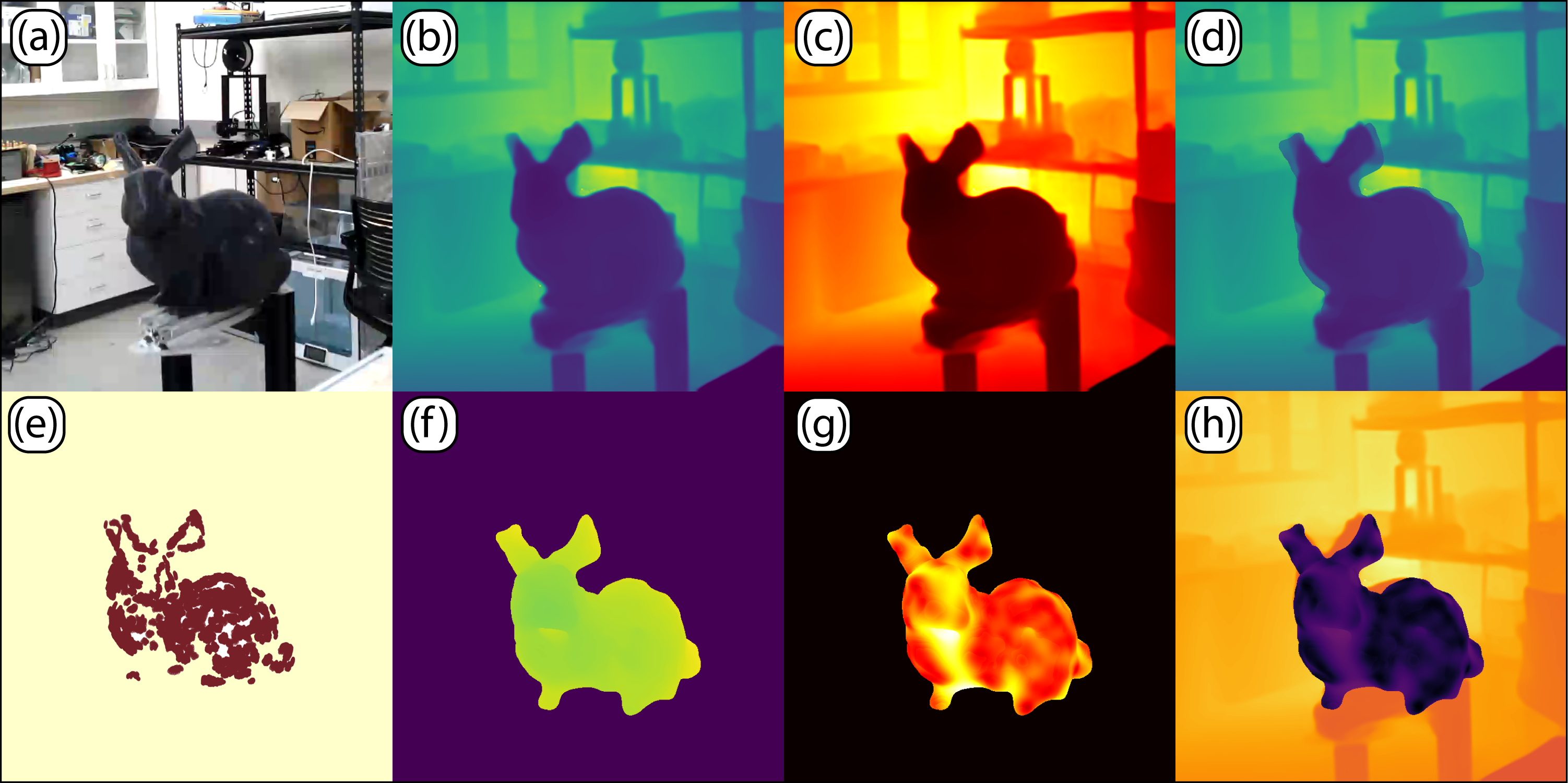
monocular depth estimator gives us a coarse depth map, which
we then align to real-world depths
with depth data from a noisy depth camera and further with
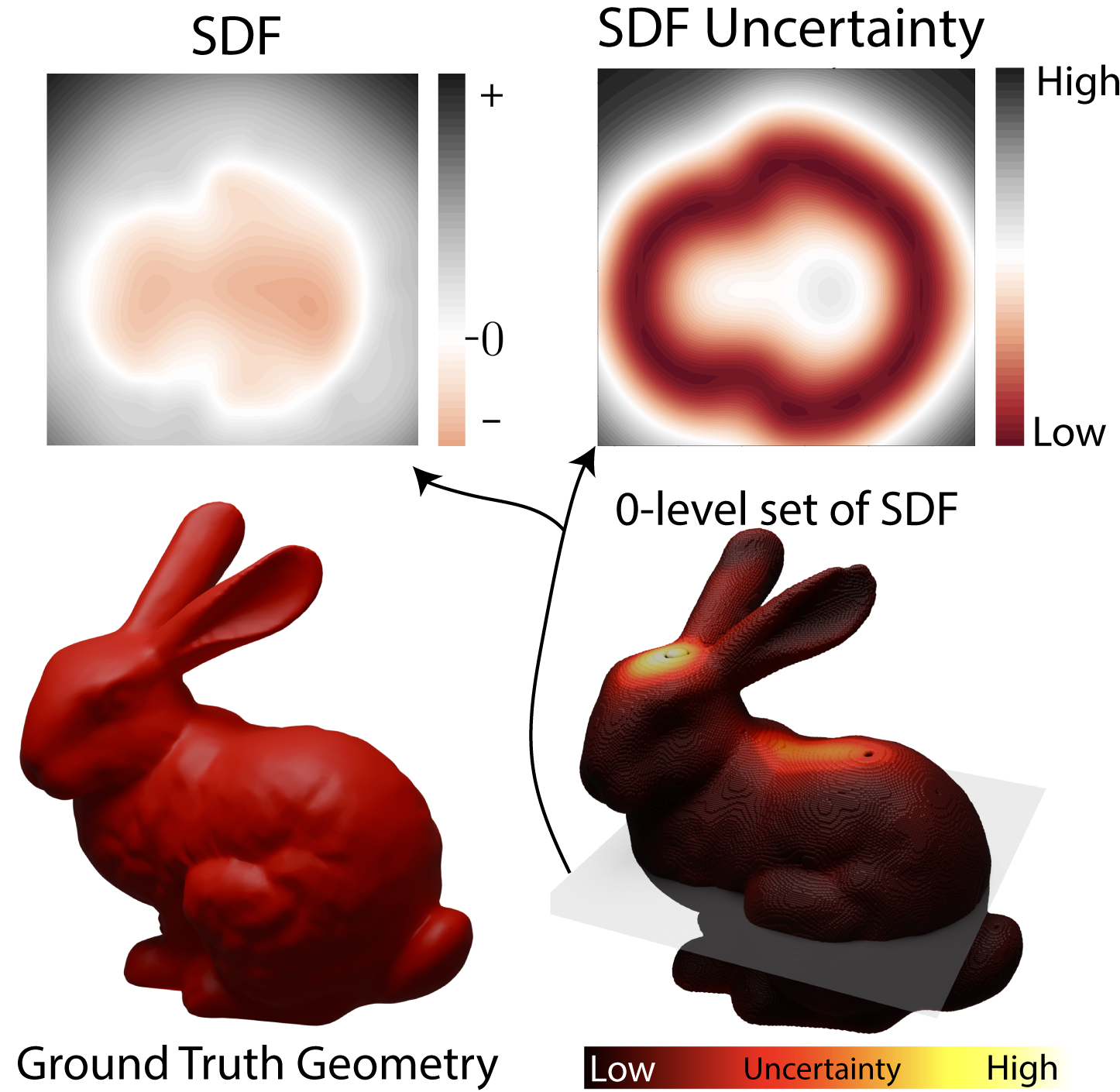
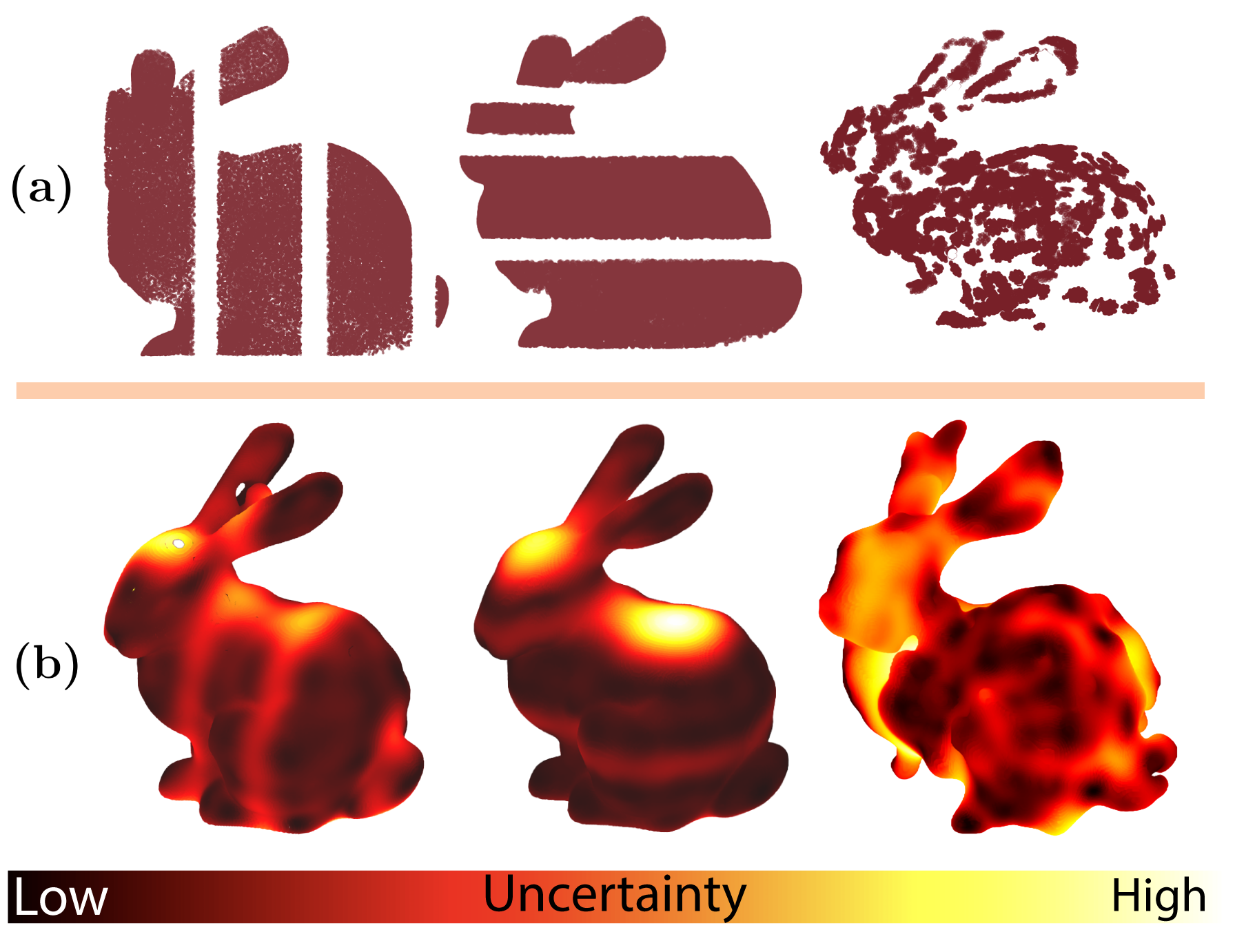
our touch data. We then combine this with our Gaussian
Process Implicit Surface, which provides a more finer depth
map.
Finally, we can use a novel, uncertainty-weighted depth loss
to train a NeRF on few view scenes, as well as mirrors and
transparent objects, where vision alone fails.